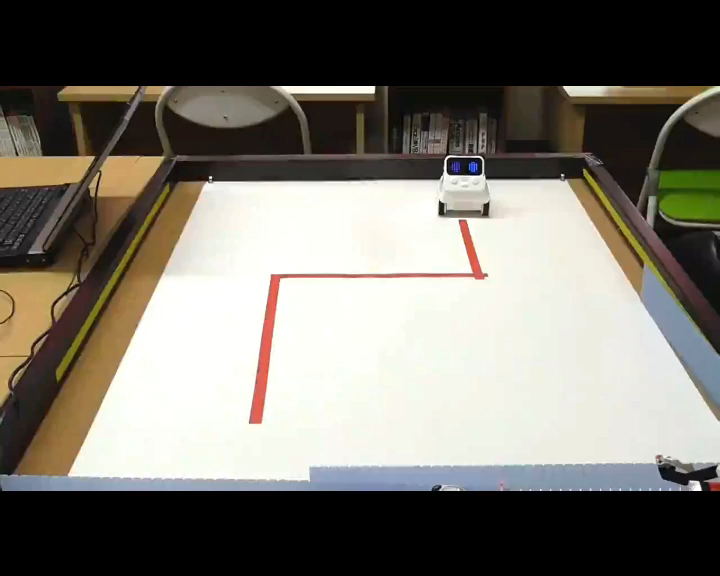
ライントレース
彼は、目標を自分で探して進みます。
彼は、物を見る目が一つしかないので右と左の区別ができません。
下しか見ないので、 周りの状況も見えません。
床が滑るので、パソコンの中のキャラクターの様に
正確な位置や角度を知ることもできません。
しかし
プログラミングで 目標を探す方法を教えて上げると・・・・・
彼は、目標を自分で探して進みます。
ソースコード
generated by mBlock5 for codey & rocky
codes make you happy
import codey, event, rocky, time
initialize variables
R_count = 0
F_speed = 0
F_time = 0
R_Angle = 0
R_error = 0
R_increase = 0
@event.start
def on_start():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
codey.display.show_image("00003c7e7e3c000000003c7e7e3c0000")
codey.speaker.play_melody('hi.wav')
@event.received('Lost')
def on_received():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
R_count = 10
while True:
for count in range(int(R_count)):
rocky.turn_right_by_degree(R_Angle)
if rocky.color_ir_sensor.is_color('red'):
rocky.turn_right_by_degree(R_Angle)
codey.broadcast('find')
rocky.stop()
codey.stop_this_script()
rocky.forward(1, 0.2, straight = True) R_count = (R_count + R_increase) R_count = (R_count + 5) for count2 in range(int(R_count)): rocky.turn_left_by_degree(R_Angle) if rocky.color_ir_sensor.is_color('red'): rocky.turn_left_by_degree(R_Angle) codey.broadcast('find') rocky.stop() codey.stop_this_script() R_count = (R_count + R_increase)
@event.received('Stop')
def on_received1():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
rocky.stop()
codey.stop_all_scripts()
@event.button_a_pressed
def on_button_a_pressed():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
F_speed = 3
F_time = 0.2
R_Angle = 2
R_increase = 10
R_error = 5
rocky.forward(F_speed, F_time, straight = True)
if rocky.color_ir_sensor.is_color('red'):
codey.broadcast('find')
codey.stop_this_script()
else: rocky.forward(F_speed, F_time, straight = True) rocky.forward(F_speed, F_time, straight = True) codey.broadcast('Lost') codey.stop_this_script()
@event.button_c_pressed
def on_button_c_pressed1():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
codey.broadcast('Stop')
@event.received('find')
def on_received2():
global R_count, F_speed, F_time, R_Angle, R_error, R_increase
while True:
rocky.forward(F_speed, F_time, straight = True)
if rocky.color_ir_sensor.is_color('red'):
rocky.forward(F_speed, F_time, straight = True)
else: rocky.stop() codey.broadcast('Lost') codey.stop_this_script()
コメント